
What?
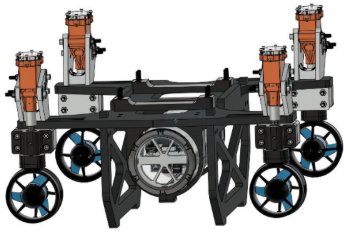
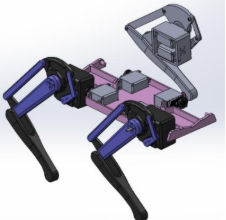
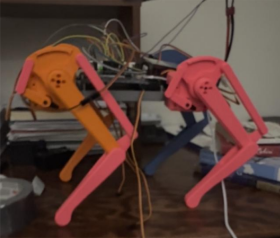
Taking inspiration from the open-source Dingo Quadruped, I fully redesigned and modeled a quadruped robot. Creating my own remotely controlled dog.
How?
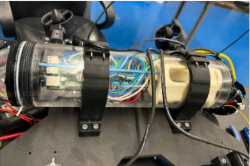
By designing, printing and wiring
my robot, I was able to learn critical
skills in CAD, 3D printing, and
electrical design. I worked with
hobby servos as well as
microcontrollers to create a working
prototype.
Goals?
After finishing an initial prototype, I
plan on reprinting and optimizing
my design, as well as implementing
ROS2 to remotely control the
quadruped. Programming certain
walking and jumping motions using
inverse Kinematics