Bio-inspired Underwater Robo-Sub Team
SolidWorks, Fusion360, ROS
Objectives
The primary objective of this project is to engineer an underwater Remotely Operated Vehicle (ROV) from scratch for the 2025 MATE ROV Competition and its parameters. The initial phase focused on mastering the fundamentals of underwater robotics, moving from a CAD concept to a functional submersible. The project's ultimate goal is to strategically move through water, adding advanced sensors and manipulation-capable actuators to gather water data from different depths and move objects under water.
Outcomes & Contributions
I was the Mechanical Lead Engineer for BURST, bulding the frame and layout of the turbines, as well as dealing with waterproofing and saftey of the entire ROV. This year, I have taken on the role of Lead Engineer for the entire ROV team and President of the club, overseeing all technical and organizational aspects of the project.
- Mechanical (Structures and Safety): As the Lead of the Structures and Safety Sub-team, I was personally responsible for designing the ROV's primary frame and overall component layout in CAD. This involved optimizing for weight distribution, hydrodynamic efficiency, and service accessibility.
- Fabrication & Assembly: I oversaw the complete construction and physical assembly of the ROV, translating the digital 3D models into a physical prototype using 3D printing and water-jet cutting.
- Electrical Integration: I was an active contributor to the electronic assembly, assisting with the wiring layout of the propulsion system and housinng them within the waterproof enclosure.
- Project Management: In my new capacity as President, I am now responsible for defining the technical roadmap, setting engineering goals, and managing the team's efforts to develop the next-generation for the 2026 MATE competition.
Technical Details & Skills
This project provides a deep, hands-on application of integrated systems as well as mechanical saftey and orientation considerations.
Mechanical & Mechatronic:
- 3D Design (CAD): I proficiently used CAD software to model, analyze, and iterate on all structural components.
- Robotic Assembly: Printing and water-jet cutting of structural componentsto maximize integrity and functionality.
Electronics & Systems:
- Waterproofing: Gained practical experience in the assembly of the electrical system, ensuring alignment of thrusters, power inputs, and internal components.
Future Development & Goals:
- Sensor Integration: The next development phase involves adding water quality sensors, which will require interfacing new hardware and writing software to read, log, and transmit environmental data.
- Robotic Actuation: A key goal is the design and implementation of a robotic actuator (e.g., a gripper) to perform complex tasks like picking up and moving items, which demands a fusion of mechanical design, electronic control, and software programming.
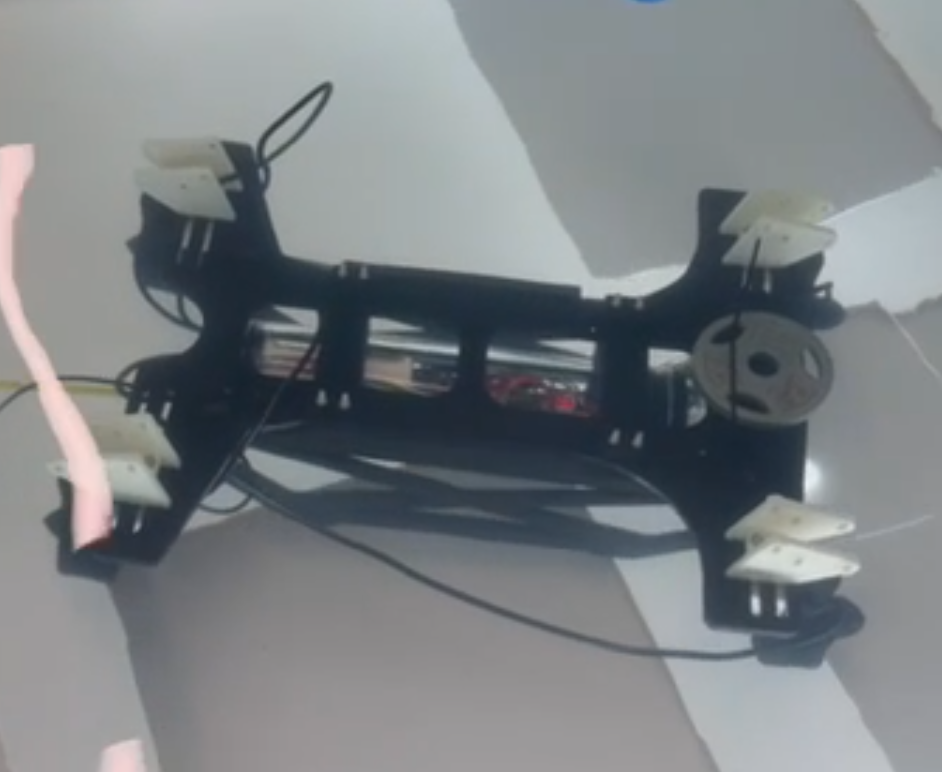
Validating the design: The ROV successfully underwater, proving the waterproofing and propulsion systems.
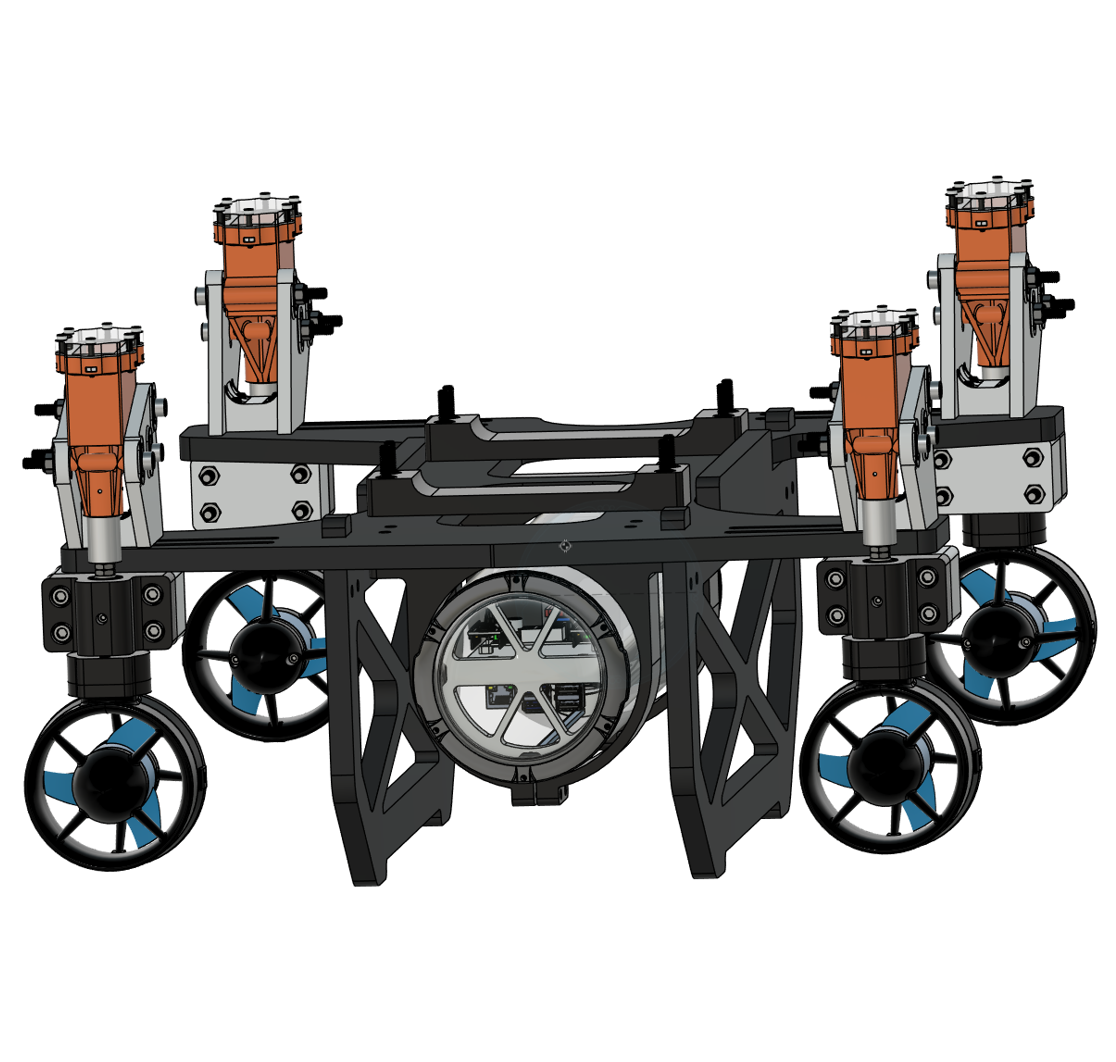
A detailed render of the ROV, which I was personally responsible for designing as head of the Structures Sub-team.

Teamwork: Leading the Structures and Safety Sub-team during the ROV's construction phase.

Frame fabrication: Water-jet cut water resistant HDPE into a 3D skeleton for the ROV.
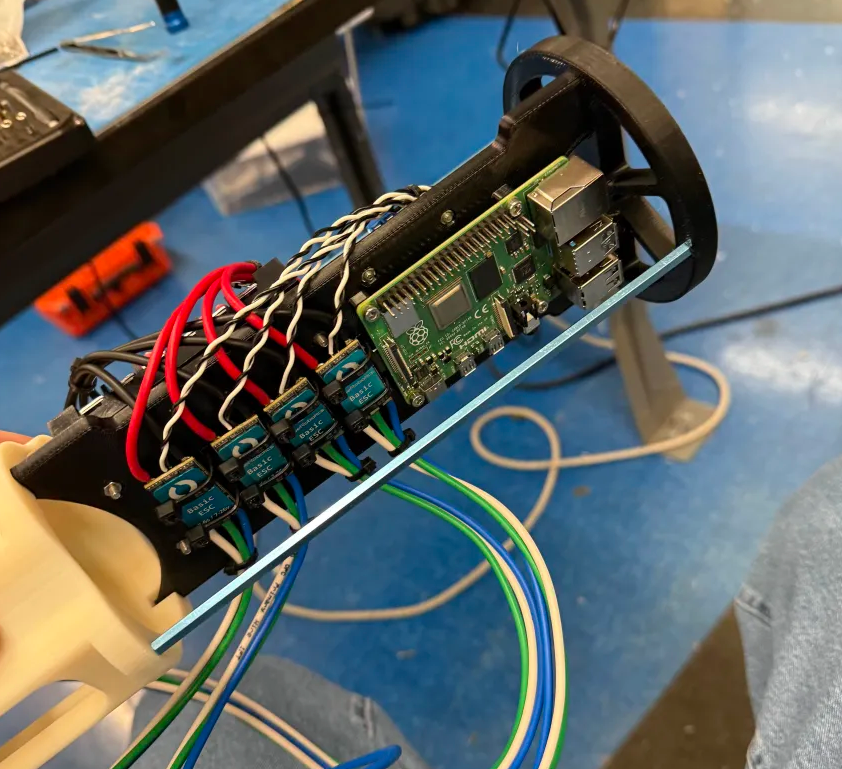
Close-up of the circuitry and mechatronic assembly I helped put together to control the vehicle.
Contact Me 🤙
Mobile: (571) 355-5253
Email: nrl80877@gmail.com
University: xsp8qh@virginia.edu