Quadruped Robot Dog
SolidWorks, Fusion360, Arduino
Objectives
The primary objective of this project was to independently engineer a custom quadruped robot from the ground up, drawing inspiration from the open-source Dingo project. The goal was to gain insight on the development pipeline for a complex robotic system, encompassing conceptualization, mechanical design, digital fabrication, and electrical systems integration. This initiative aimed to serve as a practical application of engineering principles, moving from a CAD model to a tangible, remotely controlled prototype, and laying the groundwork for advanced software implementation.
Outcomes & Contribution
The principal outcome of this project was a fully functional, first-generation prototype of the quadruped robot, which successfully validates the custom-designed mechanical and electrical systems.
- Mechanical Design: I redesigned and modeled all mechanical components in CAD, creating a unique chassis and leg structure optimized for 3D printing, ease of assembly, and the servos used.
- Fabrication: I personally managed the fabrication of all structural parts using 3D printing, iterating designs to improve tolerances, strength, and component fit
- Electrical Integration: I designed and assembled the complete electrical wiring plan, integrating 12 servos with a central microcontroller.
- Prototyping: The successful assembly and operation of the initial prototype represents a key deliverable, demonstrating a functional Version 1.0 and providing a stable hardware platform for the next phase of software development and system optimization.
Technical Details & Skills
This project required a multidisciplinary skill set, integrating hardware, software, and fabrication techniques.
Mechanical & Fabrication:
- CAD Modeling: Proficiently used CAD software to design complex, multi-part assemblies with precise tolerances for articulation and component housing.
- 3D Printing (DFA): Gained extensive hands-on experience in material selection (e.g., PLA/PETG) and tolerance optimization.
Electronics & Hardware:
- Wiring: Created wiring diagrams before using breadboards and jumper wires to prototype an Arduino with 12 servos.
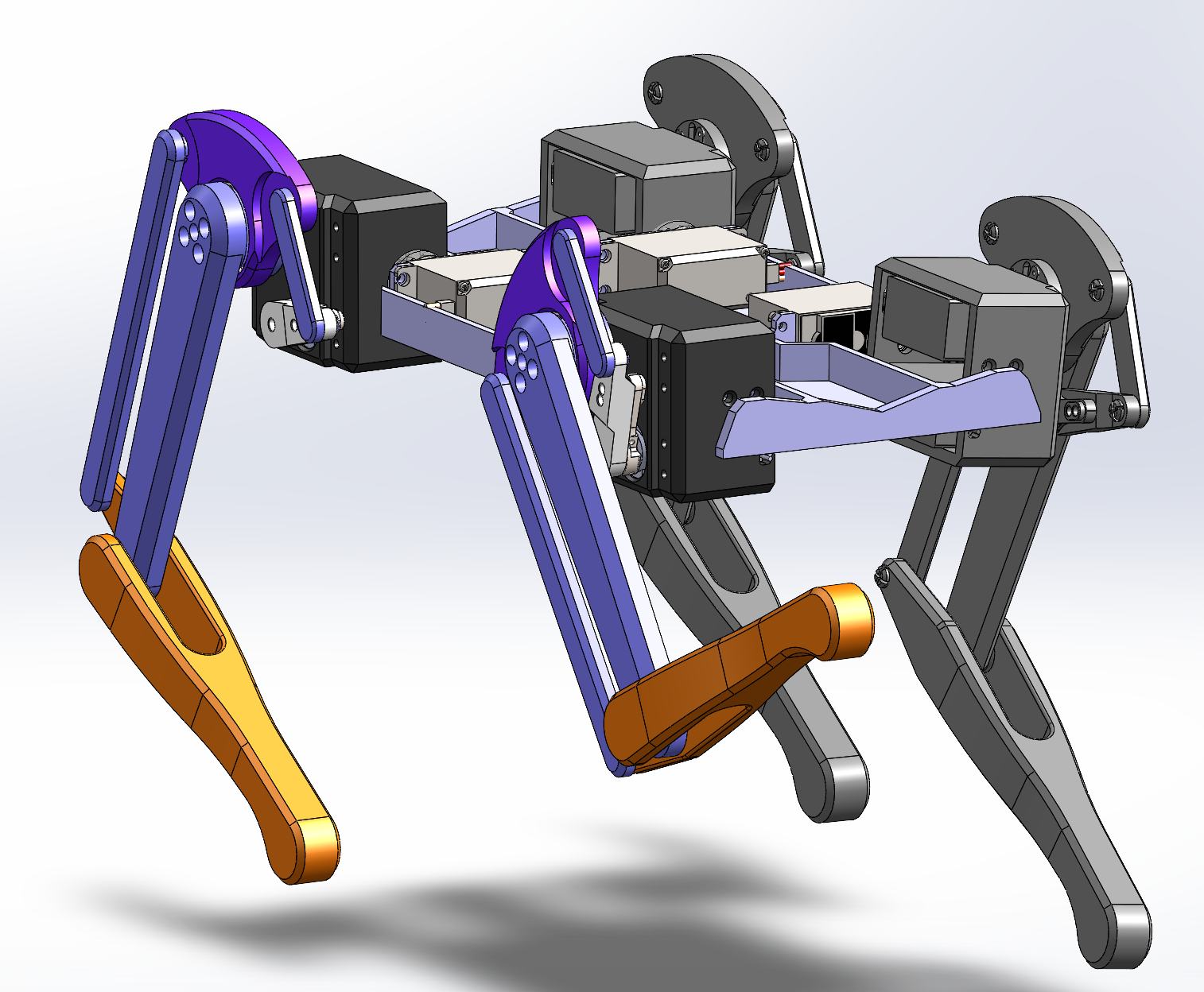
Inspired by the Dingo, this is the complete 3D model I designed from scratch before fabrication.

A close-up of the 3D-printed leg mechanics, built to house hobby servos for articulation.
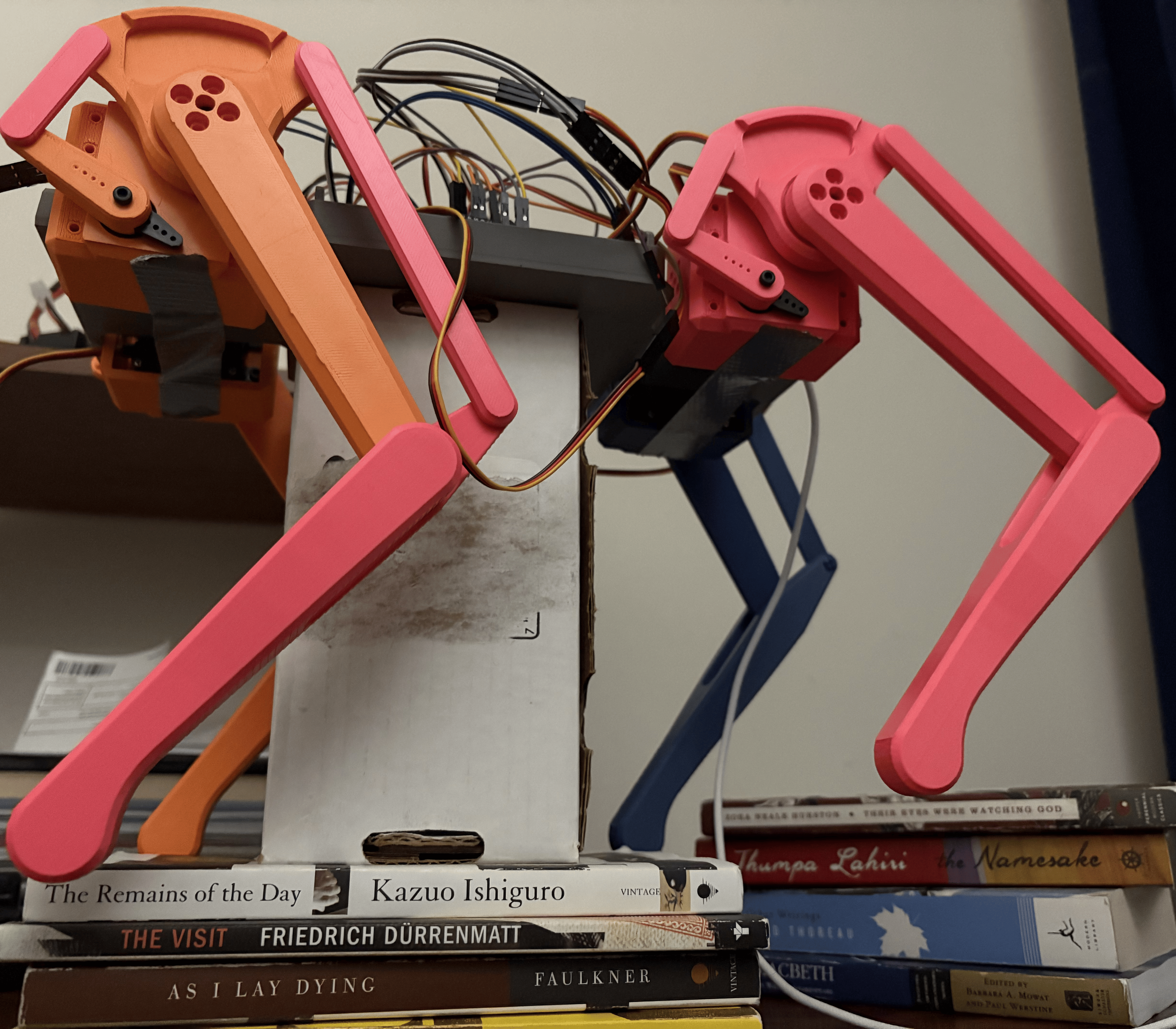
The first functional build, validating the mechanical and electrical design before implementing ROS2 and inverse kinematics.
Contact Me 🤙
Mobile: (571) 355-5253
Email: nrl80877@gmail.com
University: xsp8qh@virginia.edu